
Greifarme für Roboter
Das Ausräumen der Spülmaschine, das Aufsammeln von Müll oder das Werfen eines Balls – das Handhaben von Gegenständen ist für die meisten Menschen etwas ganz Selbstverständliches. Die große Komplexität, welche mit solchen Bewegungen einhergeht, zeigt sich beim Versuch, vergleichbare Bewegungsabläufe einem Roboter beizubringen.
Im Rahmen des Wahlfachs Robotik befassen sich die Schülerinnen und Schüler derzeit mit diesem Thema:
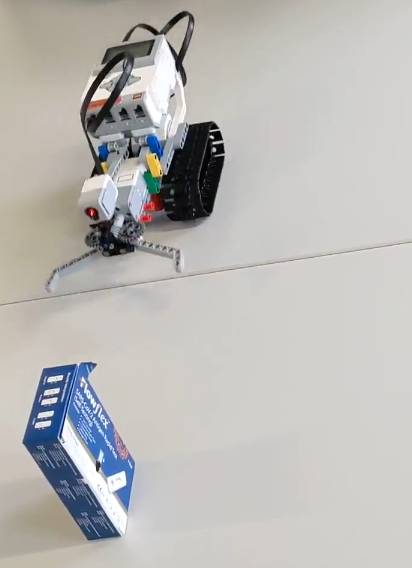
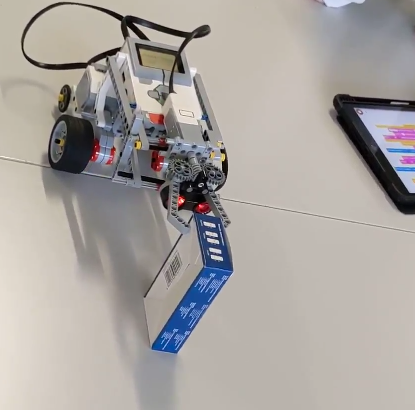
Mithilfe von Sensoren und einem motorgetriebenen Greifarm nimmt der selbst konstruierte Roboter einen Gegenstand auf und befördert diesen an einen anderen Ort.
- Zu diesem Thema konstruierten die Teilnehmerinnen und Teilnehmer des Wahlfachs zunächst Fahrzeuge nach eigenen Entwurfsideen:



- Den Robotern brachten die Schülerinnen und Schüler mithilfe eigener Programmabläufe bei, selbstständig auf einen Gegenstand zuzufahren und davor anzuhalten. Dann wurde der Gegenstand gegriffen und abtransportiert:

Bei allen Experimenten wurde schnell klar: Ein Bewegungsablauf, der für den Menschen einfach erscheint, ist für den Roboter nicht immer eine leichte Aufgabe!
Christian Höhbauer, StR (RS)